z.png)
Prototype for doctors
Welcome to MediBot, a RC robot prototype that can help medical staff pick up bone fragments and place them on placeholders, affixed on peg boards!
The prototype has a robust design which can pick up fragments with the help of servo motors attached on the robots claw, lifts it up with another servo motor, and moves on a radial axis to sway to the placeholder's space (robot movement is similar to the area between a sector of a circle).
The MediBot also uses a pneumatic cylinder to increase the robot's reach by 30%. Another feature which was devised by me, was to design a place holder for a camera feature to be added on the robot. The design was added as an additional feature for situations where the MediBot had to be present in a safe, secure and sterile environment, where contaminants should not be present.
It also helped in weight distribution for the robot, and prevented the robot in going over due to the massive force offered by the pneumatic cylinder.

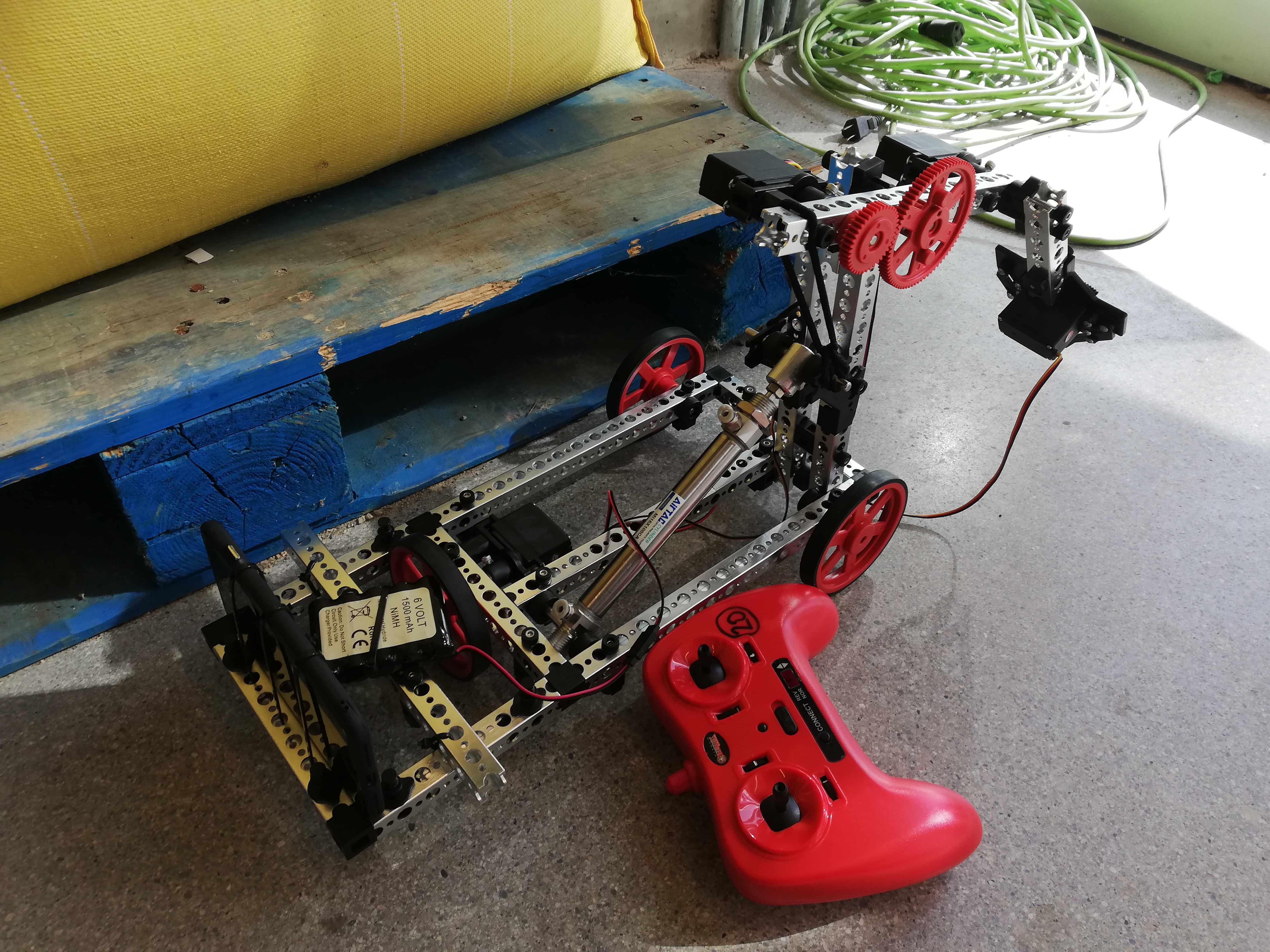
Picture showing the whole MediBot assembly
In this modern day and age, robots are on the rise, be it in an industrial manufacturing plant, or a restaurant that serves food.
For this reason, very few robots, or in this case cobots, are there in the medical industry that can help doctors in various medical procedures, without comprimising the sterile environment around that specific activity. This was one of the reasons why me, and a group of like minded individuals from the mechatronics program, decided to make the MediBot!
This was also one of the first moments that I had been exposed to the designing and making amazing robotic systems!
I would like to thank the MTE 100 staff, especially Professor Jim Baleshta and Professor William Melek, for giving us the opportunity to make this project come to life by hosting the Tron day events.
I would also like to thank my teammates - Ansh Sahny, Aumio Islam and John Paulo-Cassanta - in helping me design and build this robot.